每日經濟新聞 2022-10-03 09:01:22
每經記者 鄭雨航 每經編輯 王月龍 蘭素英 蓋源源
當地時間9月30日,特斯拉人工智能日(AI Day)在美國加尼福尼亞州帕羅奧圖開幕。
這是特斯拉歷史上第二個AI日活動。特斯拉特意將今年的AI日延遲了一個多月,主要是為了能向大眾展示其能夠運轉的人形機器人 “擎天柱”(Optimus) 。
就這點而言,特斯拉首席執行官埃隆·馬斯克(Elon Musk)確實說到做到了。
活動現場,擎天柱的原型機在萬眾期待下走上舞臺,其內部構造一覽無余,關節、骨骼、線路等都清晰可見。它向觀眾揮手,并在空中揮舞著胳膊。 馬斯克表示,這是機器人首次在沒有系繩的情況下運行。 在現場展示的視頻中,擎天柱還可以在辦公室內用噴壺澆花、雙手搬運物料等等。
但機器人的這些能力并沒有打動業內專家。
美國電機電子工程師學會(IEEE)的一篇評論員文章直言, 特斯拉未能通過其新的人形機器人原型機展示任何獨特和令人印象深刻的東西。
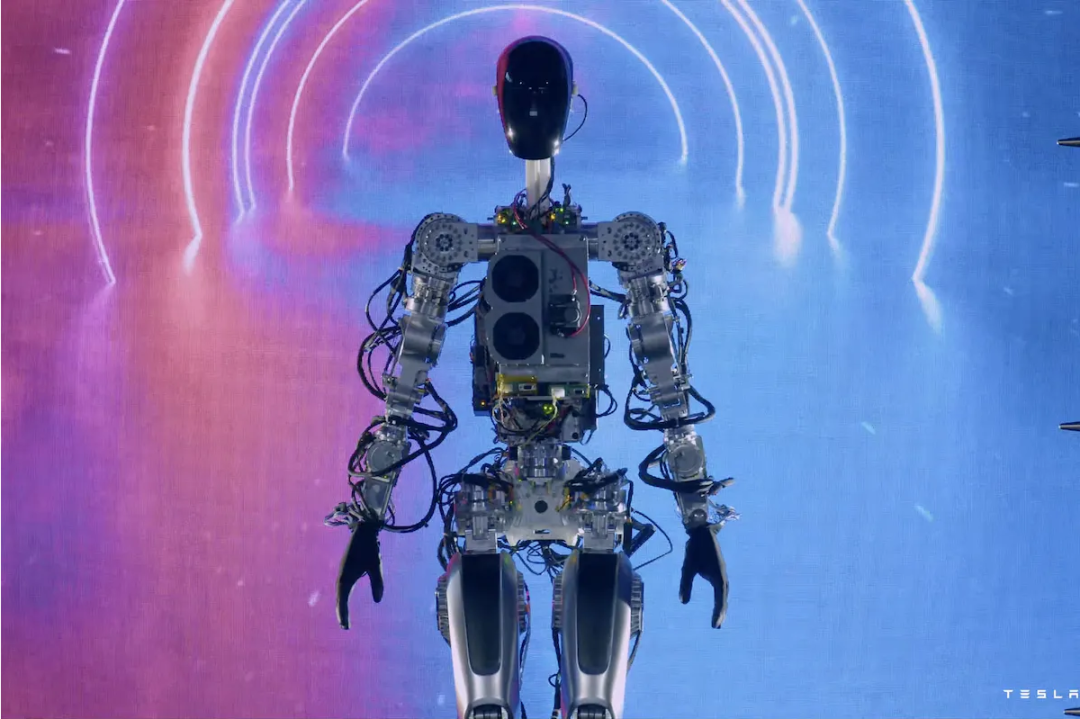
圖片來源:特斯拉AI日活動視頻截圖

IEEE:量產和價格預期“毫無意義”
IEEE的文章稱,去年8月特斯拉2021年AI日結束時,馬斯克提出了“特斯拉機器人”概念,一種機電驅動的自主性雙足“通用”人形機器人。馬斯克表示,特斯拉機器人的原型將在2022內完成。在2022年的AI日上, 特斯拉機器人原型確實有登場亮相,但事實證明,之前的炒作過度了。
“到目前為止,我們(仍然)幾乎沒有看到有跡象表明特斯拉會比其他任何人更擅長解決這個問題。特斯拉似乎沒有什么特別或令人興奮的東西能為馬斯克超越其他從事類似工作的公司的愿景提供任何獨特的基礎。我將重申我一年前說過的話:困難的部分不是建造機器人,而是讓機器人做有用的事情。”文章如是寫道。
對于擎天柱原型機當天在現場的行走演示,IEEE文章的作者評論稱,他并沒有感到特別印象深刻,只是感到一些困惑。在展臺上,“擎天柱”做的動作做得很少, 步履還有些蹣跚,動作僵硬。 這意味著它所做的“動作”很可能夠是完全腳本化的,所以并不知道這個機器人能在多大程度上自行平衡。
實際上,馬斯克當時也介紹, 為保持安全,他們不想讓機器人在舞臺上做太多的動作,讓它“摔個狗吃屎”。
不過,對于現場視頻展示的澆花的能力,IEEE文章指出,抓住噴壺有些讓人印象深刻,因為使機器人抓住纖細的噴壺手柄看起來不那么容易。另外,對于機器人拾取物體并試圖將其放入垃圾箱的動作,但 由于放置成功之前,視頻被剪切了, IEEE表示,這讓他們認為這個視頻是特斯拉精心策劃的方案。
在AI日現場,馬斯克表示,特斯拉有信心以較低的成本實現量產,最終產量將達到數百萬臺。據馬斯克預計,擎天柱的售價將不到2萬美元(約合人民幣14萬元)。
對此, IEEE直言,在目前看來這些“預期”和數字毫無意義。
TechCrunch也評論稱,除非特斯拉的AI團隊在讓機器人如人類般執行任務方面取得了非常快的進展,否則消費級產品似乎不太可能在明年推出。
而倫敦大學學院計算機科學名譽教授、英國皇家學會科學媒體專家Peter J. Bentley在接受《每日經濟新聞》記者郵件采訪時評價稱,只要投入的資金足夠, 要大規模生產人形機器人并不是沒有可能,但機器人能不能按設計預期那樣完成工作,還是另外一碼事。

圖片來源:特斯拉AI日活動視頻截圖
專家:沒必要開發雙足,應專注手的研發
對于擎天柱未來的發展,IEEE文章認為,在中短期內,特斯拉很難找到擎天柱在獨特用途方面的定位。
SRI International的機器人臨時總監亞歷山大·克恩鮑姆(Alexander Kernbaum)向CNBC表示,要創造一種可以在工廠中發揮作用的機器人,特斯拉真的沒有必要開發雙足機器人。他解釋說,“對于工廠環境來說,移動性應該盡可能簡單,這意味該用車輪走路,而不是腿。”
一方面,機器人的腿需要大量的動力,這會給特斯拉專門為機器人開發的電池帶來更多負荷。此外, 雙足機器人就像人一樣,容易被絆倒和摔倒, 而輪式機器人就不太可能翻倒。克恩鮑姆建議,安全問題標準應該對標工廠機器人。
克恩鮑姆認為,特斯拉更適合專注于研究機器人手。他說:“手就像終極的多功能工具。 靈巧性和手持物體操作是10年來的巨大挑戰之一, 它將對所有精密制造產生明顯影響。
“實際上,人形機器人能夠做多少是移動性和人工智能能力的復合問題。”卡內基梅隆大學機械工程助理教授、研究人類運動的研究員埃尼·哈利拉杰(Eni Halilaj)對CNBC表示, 模仿人類移動性將受到限制,部分原因是目前人類對自己的移動性知識的掌握也有限制。
“我們的身體是一個復雜的工程系統,我們仍然沒有完全理解。”哈利拉杰說。“我們還有很長的路要走,才能對它進行逆向工程,這使得人形機器人的運動規劃和控制具有挑戰性。例如,我們仍然不明白我們的中樞神經系統如何選擇特定的肌肉協調模式來執行日常任務,這是生物力學和神經控制的巨大挑戰之一。
仿生學的成功取決于我們對生物系統的理解。”哈利拉杰解釋稱。
“人類所做的很多事情對機器人來說非常非常困難,這點并不會因為機器人是手臂狀還是人形狀而改變。” 人形機器人公司Agility Robotics的首席技術官赫斯特告訴路透社。
記者|鄭雨航
編輯|王月龍 蘭素英 蓋源源
校對|趙慶

|每日經濟新聞 nbdnews 原創文章|
未經許可禁止轉載、摘編、復制及鏡像等使用
如需轉載請與《每日經濟新聞》報社聯系。
未經《每日經濟新聞》報社授權,嚴禁轉載或鏡像,違者必究。
讀者熱線:4008890008
特別提醒:如果我們使用了您的圖片,請作者與本站聯系索取稿酬。如您不希望作品出現在本站,可聯系我們要求撤下您的作品。
歡迎關注每日經濟新聞APP